第二章——控制系统的数学模型
讨论时域和复数域的数学模型
引言
控制系统的数学模型描述的是系统内部物理量(或变量)之间的数学关系
- 静态数学模型:描述变量间关系的代数方程
- 动态数学模型:描述变量各阶导数之间关系的微分方程
目的是对系统做性能分析
模型的建立方法:
- 分析法:根据物理化学规律等写出相应的运动方程(本章所用方法)
- 实验法:人为给定输入,记录其输出响应,并用适当的数学模型去逼近
常用的数学模型:(本章研究加粗部分)
- 时域:微分方程、差分方程、状态方程
- 复数域:传递函数、结构图
- 频域:频率特性
2-1 控制系统的时域数学模型
重点研究线性、定常、集总参量控制系统
1. 线性元件的微分方程
- 确定输入和输出
- 根据物理、化学规律写出微分方程
- 想去中间变量,得到输出与输入的微分方程
2. 控制系统的微分方程
- 由系统原理图画图系统方块图
- 分别列写各元件的微分方程
可以发现,RLC无源网络和弹簧-质量-阻尼器机械系统的数学模型均是二阶微分方程,我们称这些物理系统为相似系统
3. 线性系统的基本特性
- 可叠加性
- 均匀性
这说明可以把激励单独处理,大大简化了研究
4. 线性定常微分方程的求解
拉氏变换法
- 考虑初始条件,对每一项进行拉氏变换,得到关于s的代数式
- 有代数方程求出拉氏变换函数的表达式
- 拉氏反变换到的时域方程解
5. 非线性方程的线性化
切线法
- 把f(x)在某一点泰勒展开,仅保留一次项
- 对多变量函数也同样处理
感觉有点像把各个维度解耦了,并且只按切线/切平面来做计算
6. 运动的模态
如果n阶微分方程的特征根存在,则对应得到的e指数函数解就是微分方程所描述运动的模态,又称振型
每一种模态都代表一种类型的运动状态,齐次微分方程的通解就是模态的线性组合
共轭复模态和可以写成实函数模态与的形式
2-2 控制系统的复数域数学模型
传递函数非常重要,是根轨迹、频率法的基础,同时还可以研究结构变化对系统性能的影响
1. 传递函数的定义和性质
==定义==
- 线性定常系统的传递函数,定义为零初始状态下,系统输出量的拉氏变换与输入量的拉氏变换之比
==性质==
- 传递函数是复变量s的有理真分式,具有复变函数的所有性质
- 传递函数值取决于系统和元件的结构与参数,与输出量无关
- 传递函数与微分方程有相通性
- 传递函数G(s)的反变换为脉冲响应h(t)
2. 传递函数的零点和极点
略
3. 传递函数零极点对输出的影响
传递函数极点——微分方程的特征根——决定了系统自由运动的模态——强迫运动中也会包含这些自由运动的模态
如
自由运动的模态是和
当时
式中,前两项具有与输入函数 相同的模态,后两项中包含了由极点 -1 和 -2 形成的自由运动模态。这是系统“固有” 的成分,但其系数却与输入函数有关,因此可以认为这两项是受输入函数激发而形成的。
传递函数的极点可以受输入函数的激发,在输出响应中形成自由运动的模态。
传递函数的零点并不形成自由运动的模态,但是他们影响模态在响应中的比重
零点如果距离原点远、离极点近,则对应模态所占比重就小
4. 典型元部件的传递函数
- 电位计
- 负载效应
- 测速发电机
- 电枢控制直流伺服发电机
- 两相伺服电动机
- 无源网络
- 可能需要考虑负载效应(两个电路直接链接器传递函数不是简单相乘)
- C的复阻抗为,L的复阻抗为Ls
- 单容水槽(一阶过程)
- 电加热炉(一阶过程)
- 有纯延迟的单容水槽(多了延时因子)
- 双容水槽(二阶过程)
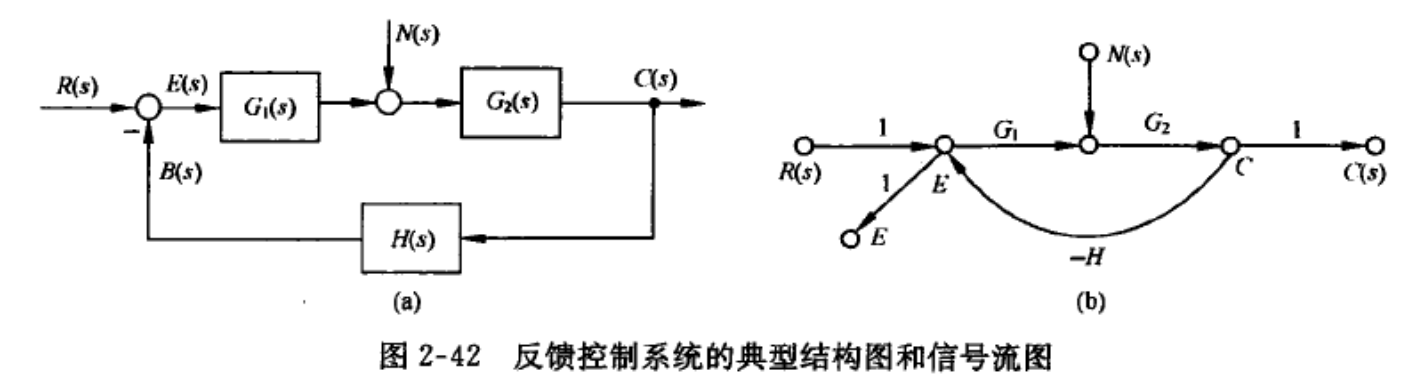
2-3 控制系统的结构图和信号流图
1. 系统结构图的组成和绘制
四种基本单元
- 信号线
- 引出点(测量点)
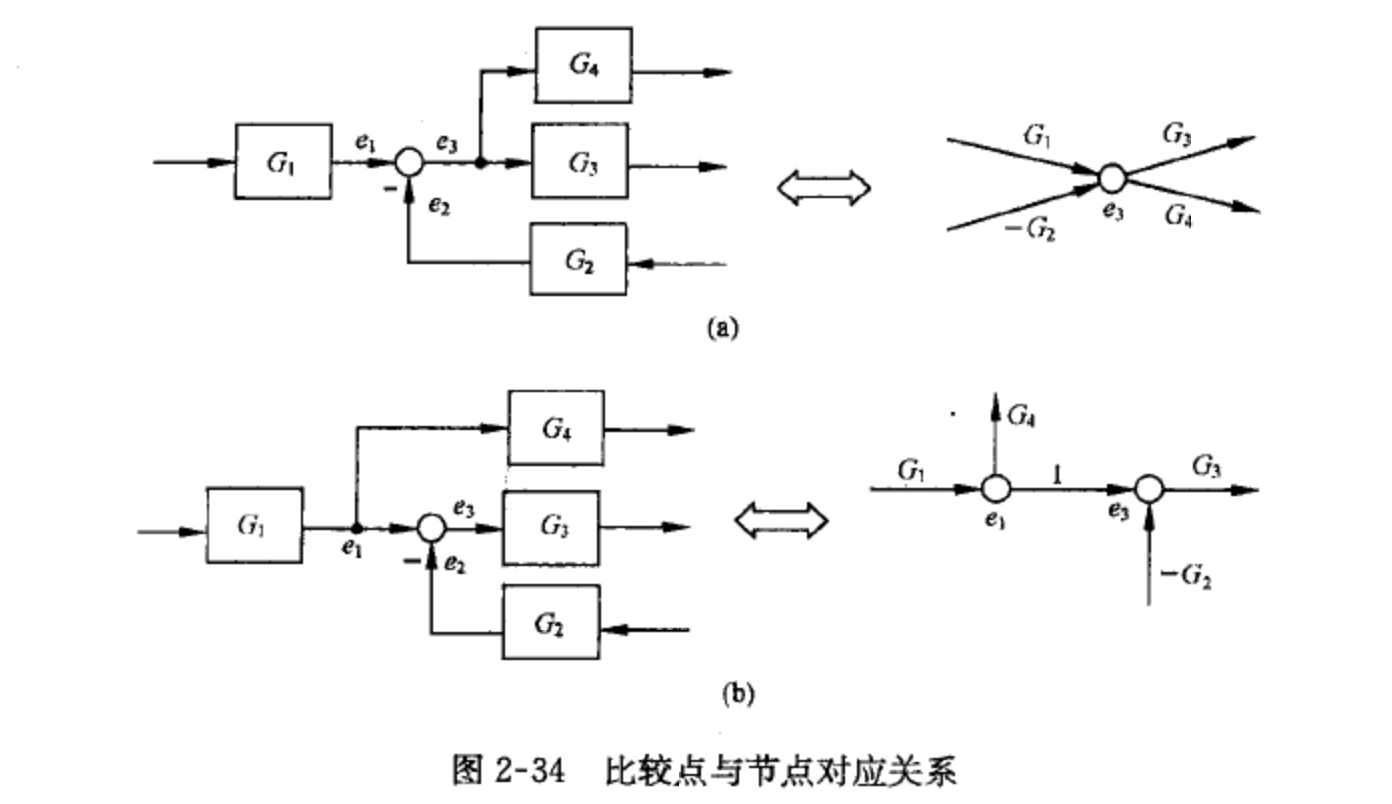
- 比较点(综合点)
- 方框(环节)
2. 结构图的等效变换和简化
这个过程对应于方程消去中间变量求系统传递函数的过程
串并联
反馈
- 负号对应正反馈,正号对应负反馈
3. 信号流图的组成和性质
信号流图起源于梅森用图示法来描述一个或一组线性代数方程式,它是有节点和支路组成的一种信号传递网络
只有节点和支路两种成分,而结构图有四种基本单元
性质:
- 节点标志系统的变量
- 支路相当于乘法器
- 信号在支路上只能沿单箭头传递
- 给定系统的信号流图不是唯一的
名词术语
- 源节点(输入节点)/陷节点(输出节点)
- 混合节点
- 前向通路——信号从输入节点到输出节点传递时,每个节点只通过一次的通路
- 前向通路增益——
- 回路——起点和终点在同一节点,而且信号通过每一节点不多于一次的闭合通路
- 回路增益——
- 不接触回路——回路之间没有公共节点
4. 信号流图的绘制
- 从系统微分方程——每个变量指定一个节点
- 从结构图——把传递的信号用小圆圈表示
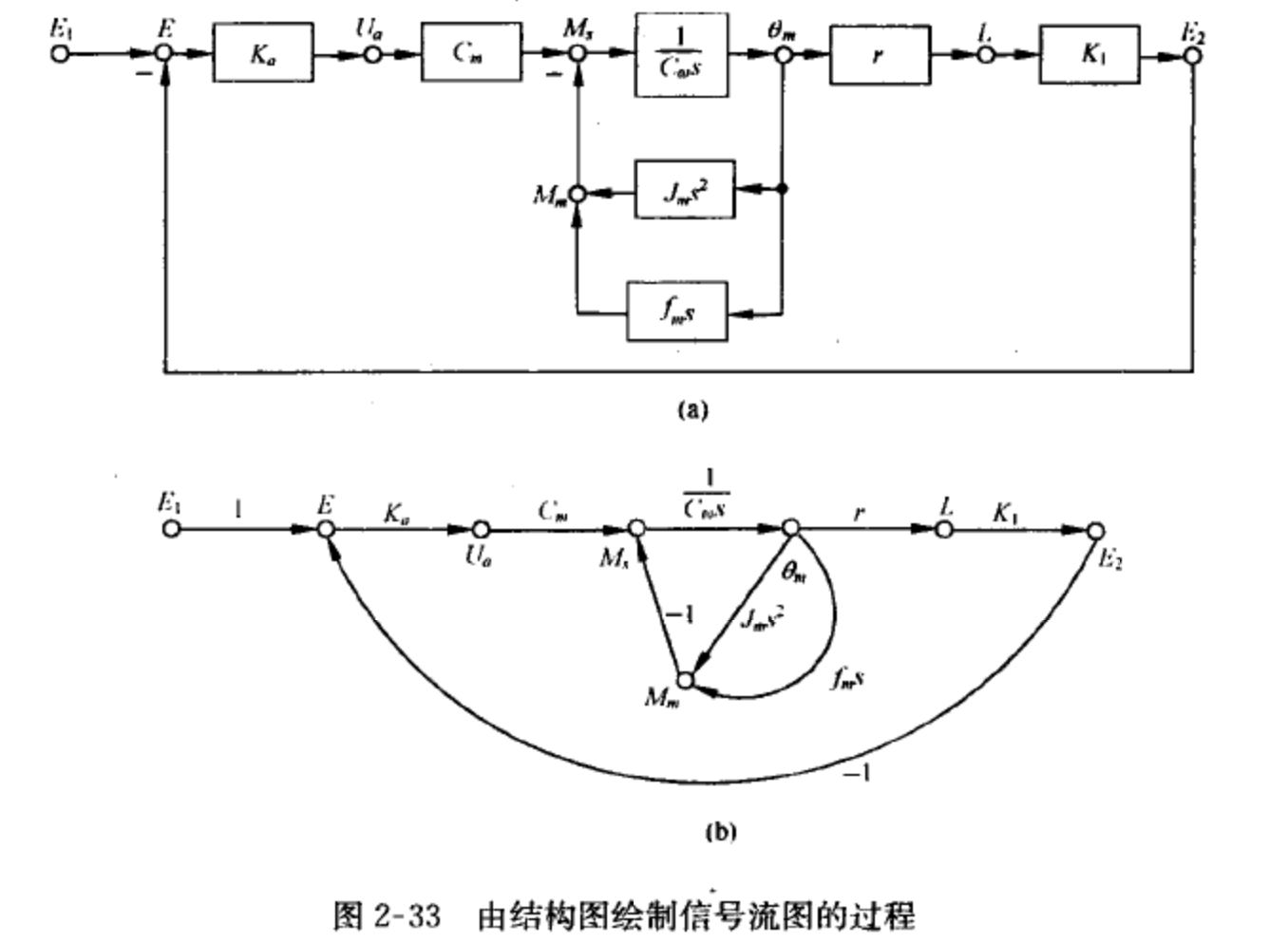
- 信号流图的简化
支路增益为1(-1)的相邻两个节点,一般可以合并为一个节点,上图中的和可以合并成一个节点,变量是
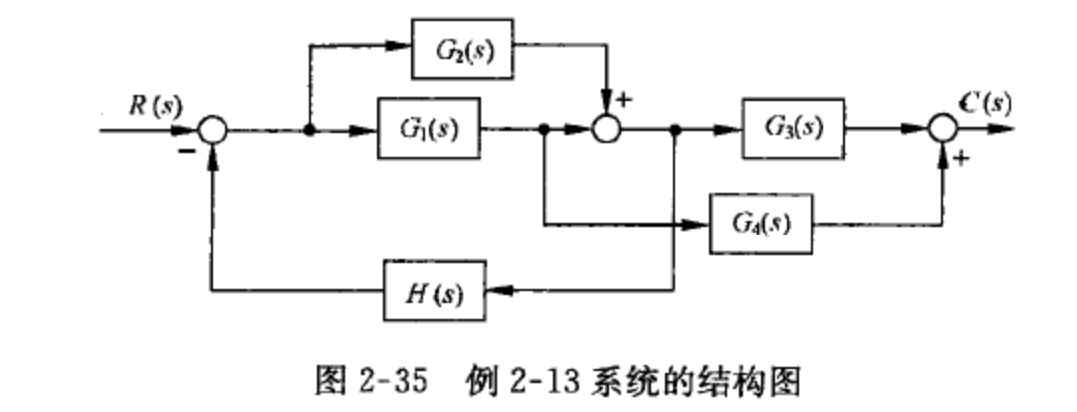
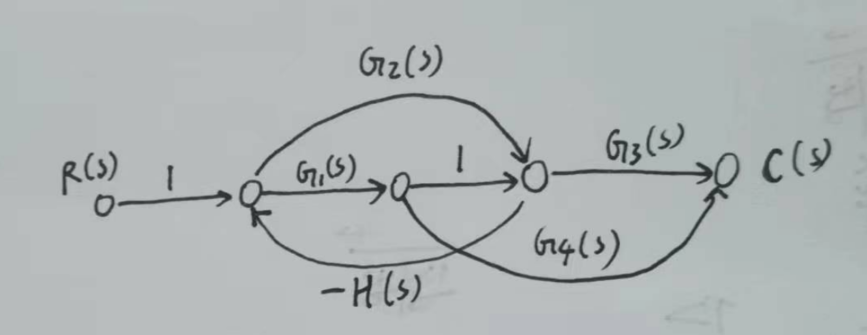
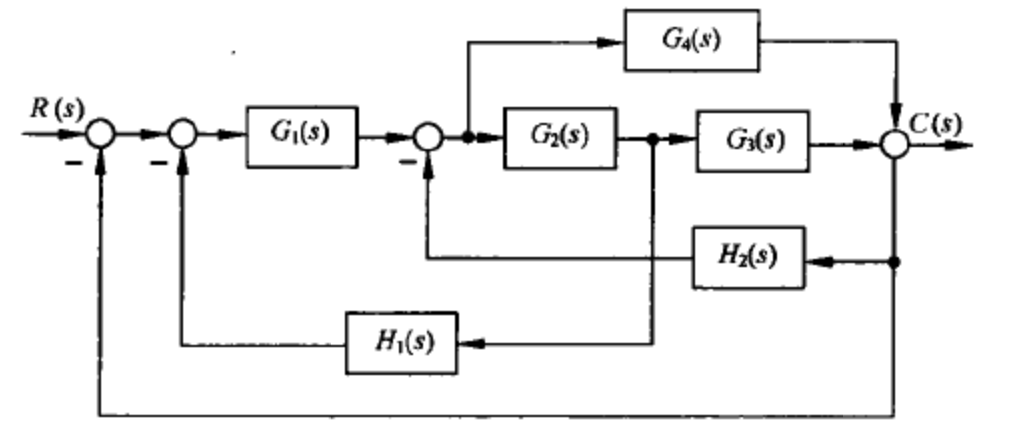
例:绘制下述系统结构图的信号流图
可以先按顺序画出中间通路,再补齐上下的分支
5. 梅森增益公式
本质上是应用了克莱姆法则求解方程组,表述为
其中分母多项式为:
- 表示信号流图中所有单独回路的回路增益之和项
- 表示信号流图中每两个互不接触的回路增益之乘积的和项
- 为所有互不接触的单独回路中,每次取其中三个回路的回路增益的乘积之和
分子中
- 是第 条前向通路总增益
- 是与第 条前向通路对应的余因子式
- 等同系数行列式中去掉与第条前向通路接触的所有回路的回路增益项之后的余子式
例:
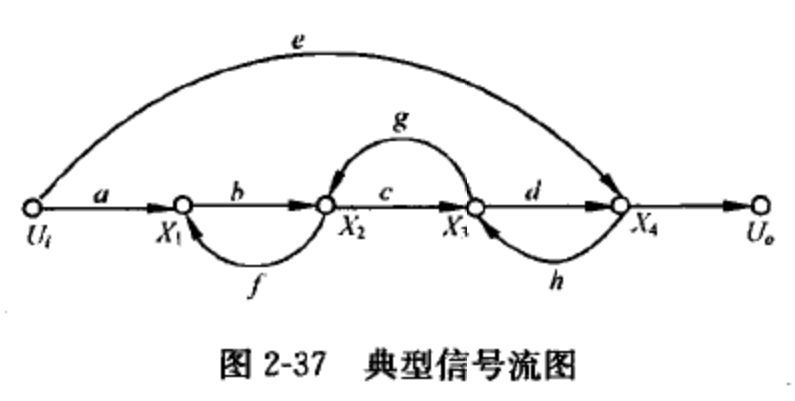
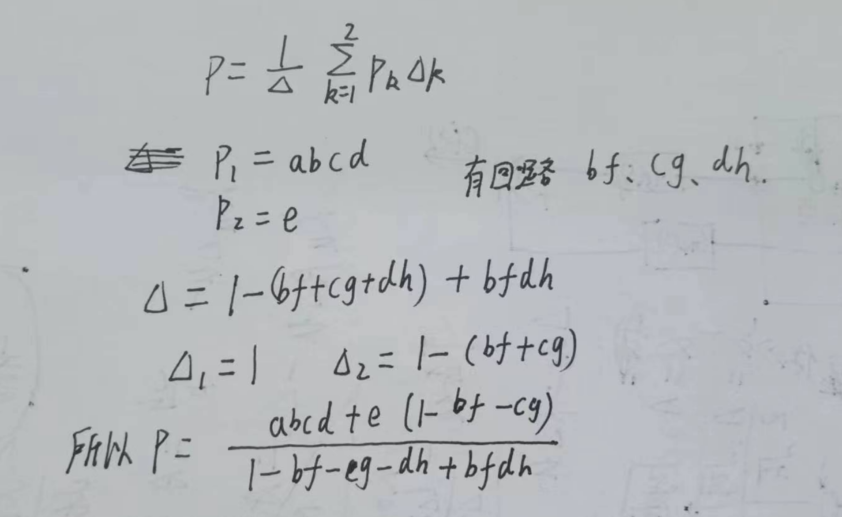
例:
先画流图,再计算
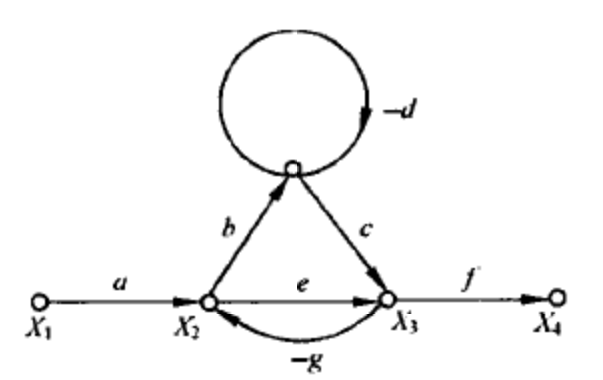
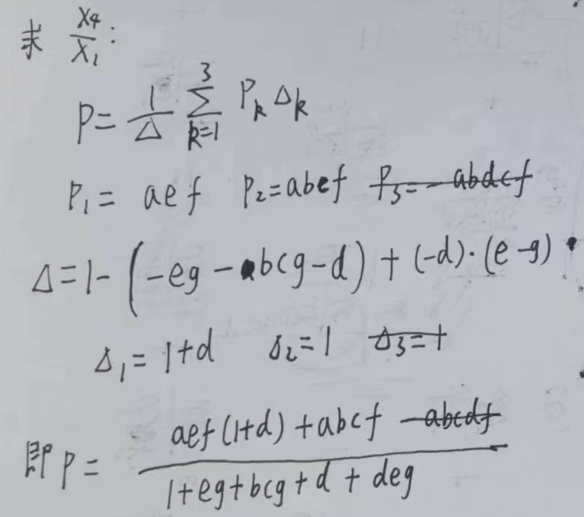
例:
求X4/X1和X2/X1
X4/X1:
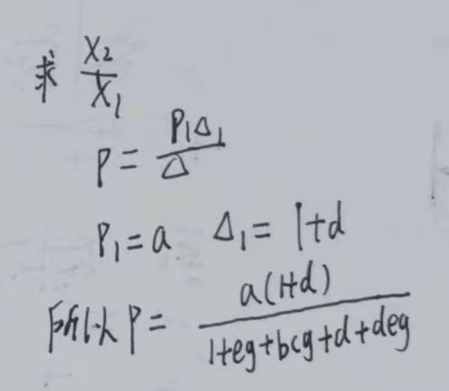
X2/X1:
注意求X2/X1的时候仍然是一样的用法
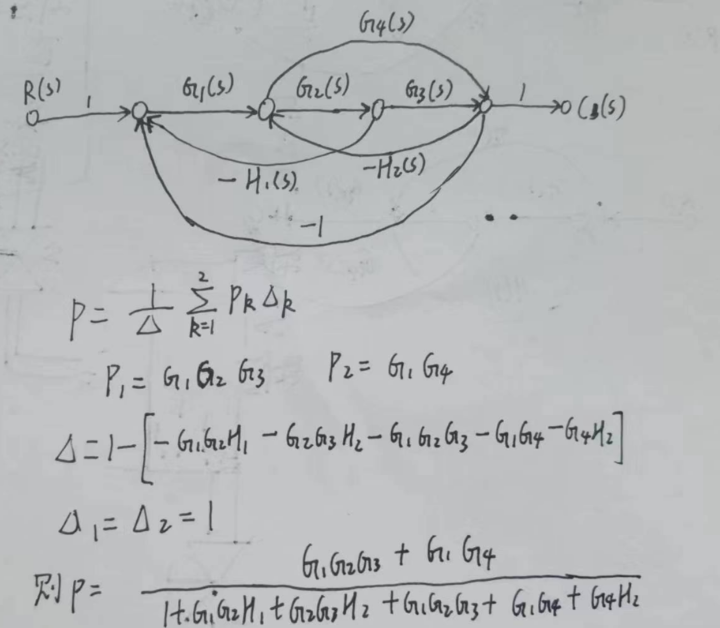
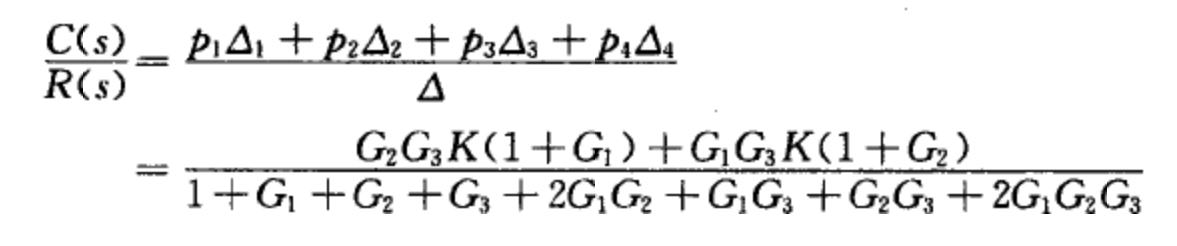
例:
这里有四个回路,且存在三个回路互不相交,所以有项

6. 闭环系统的传递函数
有时候我们需要研究扰动对系统输出的影响,或是以误差为输出量,所以我们在画流图的时候可以画多个源节点或陷节点:
(1)输入信号作用下的闭环传递函数(以作输入)
(2)扰动作用下的闭环传递函数(以作输入)
(3)输入和扰动同时作用下的系统输出(叠加原理)
上式如果满足 和 的条件, 则可简化为
此时,系统的输出值只取决于反馈通路传递函数和输入信号
既与前向通路传递函数无关, 也不受扰动作用的影响。【深度负反馈】
特别是当 , 即单位反馈时, , 从而近似实现了对输人信号的完全复现, 且对扰动具有较强的抑制能力。
(4)闭环系统的误差传递函数
注意到本例中各种闭环系统传递函数的分母形式均相同,这是因为它们都是同一个信号流图的特征式,即, 式中 是回路增益,上述系统的开环传递函数, 它等效为主反馈断开时,从输入信号 到反馈信号 之间的传递函数(只断开反馈,但是不删除下面的)