舒勒原理
舒勒摆与舒勒原理
问题引入
在惯性导航系统中,惯导平台要求精确地跟踪当地水平面(也就是惯导平台的垂直轴必须精确跟踪当地垂线),以便精确的给出加速度的基准。
怎么实现?
——利用单摆来指示垂线
普通摆如何指示垂线
在载体上挂一个单摆时,如果载体静止或匀速直线运动,则单摆的平衡位置可以指示垂线方向
但是当载体作加速运动的时候,单摆的平衡位置不能指示地垂线,而是偏离了一个角度,此时单摆受到了加速度干扰
能否让单摆不受加速度干扰?
不受加速度干扰的单摆
- 一方面,有加速度时单摆会偏移一个角度
- 另一方面,地球是圆的,向前移动时地垂线也会偏移
可以猜想到,当摆长于地球半径相同时,不管支点如何移动,都不会影响摆锤及其平衡位置,即单摆始终指示地垂线而不受加速度的干扰【舒拉原理】
提示
铅锤方向的加速度不会干扰单摆的平衡位置,但水平方向的加速度会使单摆振动。若要单摆不受影响,必须使单摆的摆长具有地球半径的长度,这种单摆称为舒勒摆。可知这种单摆的固有震荡周期为84.4min
相关定义
舒勒原理
一个指示垂线的系统,如果其固有震荡周期为84.4min,则当运载体在地球表面易任意方式移动时,此装置将不受运载体加速度的干扰。
舒勒调谐
通过选择参数使得一个指示垂线的装置满足舒勒原理的条件,称为舒勒调谐
实际意义
只有使惯性导航系统成为舒勒调谐的系统,惯导系统才能不受运载体加速度的影响始终精确的跟踪当地水平面
证明过程
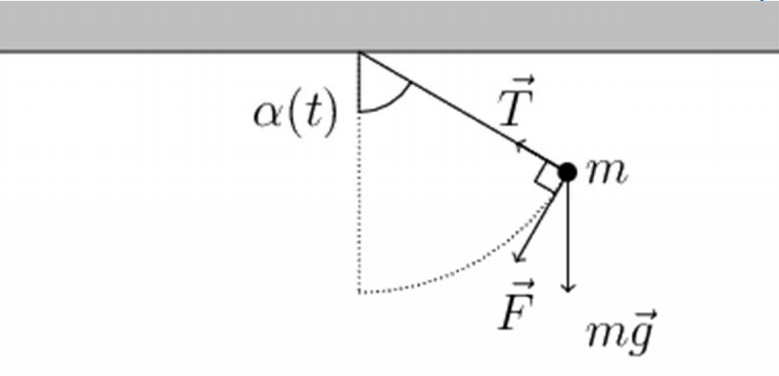
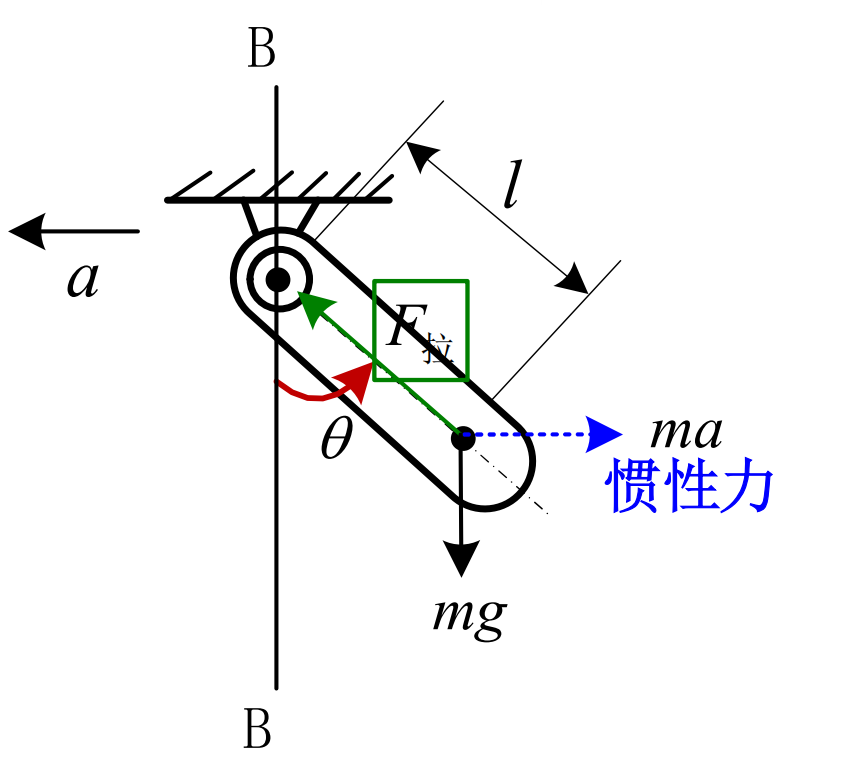
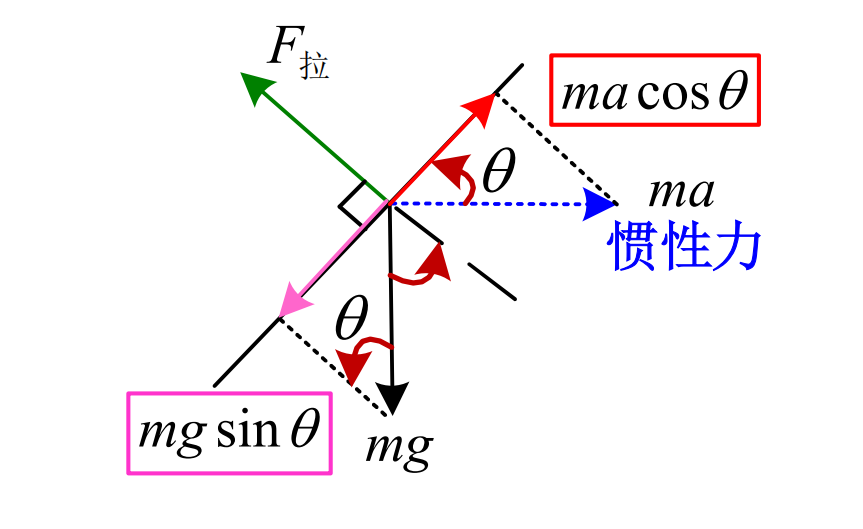
一、分析受力
二、分析力矩
建立摆角微变方程
设单摆偏移竖直线的角度为
- 重力产生的力矩:
- 惯性力产生的力矩:
设单摆的转动惯量为,则:
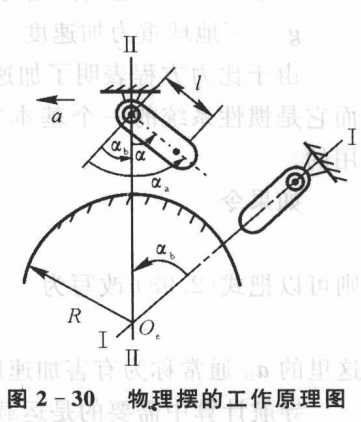
注意其中和的区别,如下图,设支点从I运动一小段时间后来到了II的位置,则指的是相对于之前地垂线的偏角,而是相对于现在地垂线的偏角,是他们的差,他们之间满足关系
已知:
其中
则: