平台式惯导系统
基本原理、组成
基本原理
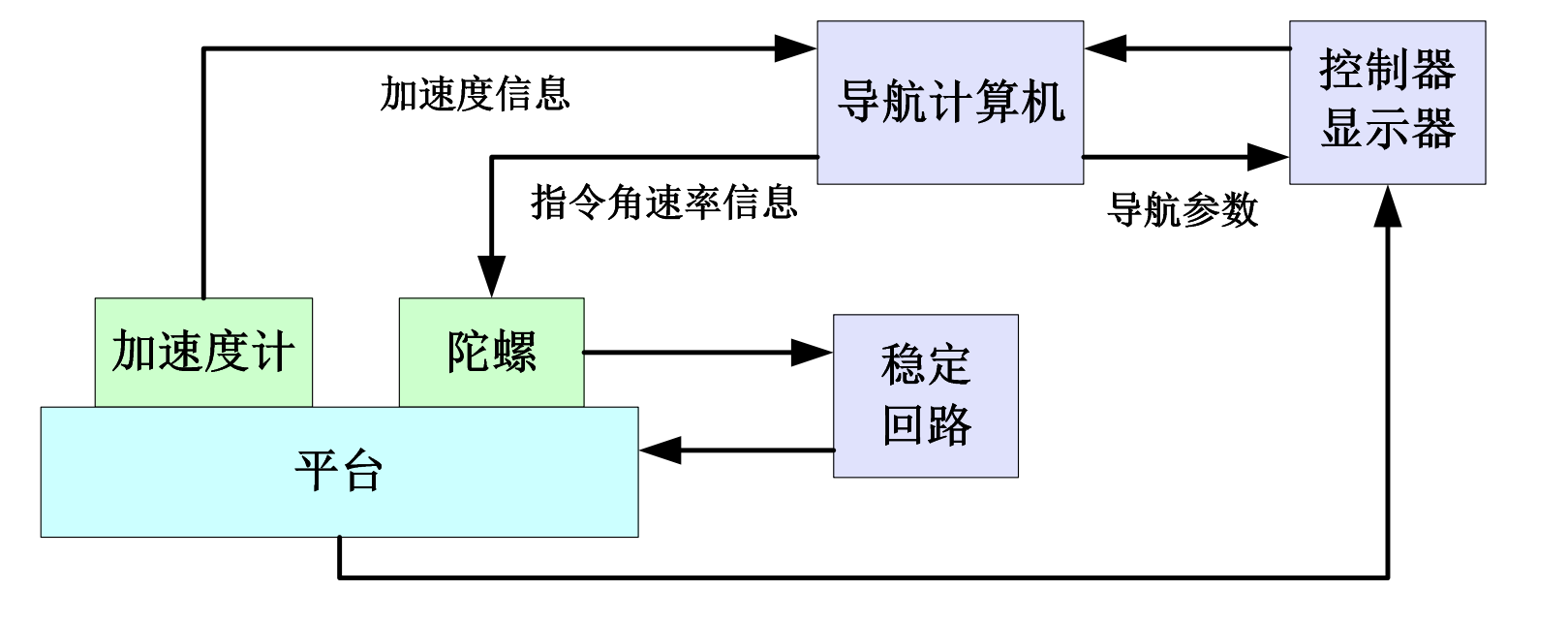
- 核心是一个陀螺稳定平台,确定了一个平台坐标系
该坐标系精确模拟了某一选定的导航坐标系,可以提取出载体相对于导航坐标系加速度矢量的三个分量
通过两次积分得到速度和位置
- 平台上装有三个单自由度陀螺和三个加速度计
要想让平台在一定的工作时间内始终保持在地理坐标系内,必须给陀螺力矩器施加力矩,使平台进动,跟踪地理坐标系的运动。
不同方案的平台式惯导系统,其组成结构是相似的,区别主要是选用的导航坐标系不同,因而导航参数与指令角速率的计算过程不同,即力学编排方程不同。
需要解决的问题
- 如何由比力信息提取出所需加速度信息
- 如何进行平台指令角速度及导航参数的计算
- 如何使平台回路满足舒勒调谐
- 如何进行精确的初始对准
1. 比力方程回顾
又是熟悉的比力方程:
比力=相对+牵连+哥氏-重力
其中:
- 为地球坐标系,为平台坐标系,他们均为非惯性系,是地球惯性系
- 为平台相对地球坐标系的加速度,是惯导系统所要提取的信息
- 可以由积分得到
- 地球自转角速度已知
- 坐标系相对地球旋转角速度
- 如果平台精确跟踪当地水平坐标系,在水平面上的分量为0
- 比力由加速度计直接得到
2. 惯性平台的控制(水平通道)
惯性平台的运动:
- 平动——由平台稳定回路实现
- 转动——由平台修正回路实现
以单通道惯导系统为例:
要求:模拟当地地理坐标系(水平面坐标系的一种)
硬件:加速度敏感轴为正北方向,陀螺仪敏感轴为正东方向
具体控制过程:
加速度计发现载体在以加速度沿子午线向北航行时,当地垂线的方向不断变化,变化的瞬时角速度为,其中可以通过加速度积分得到
为了使平台能够跟踪地垂线的变化,计算机应向陀螺提供相同的指令角速率信息
角速率信号转化为电流传递给平台控制力矩,产生的力矩使平台进动进而跟踪地理坐标系
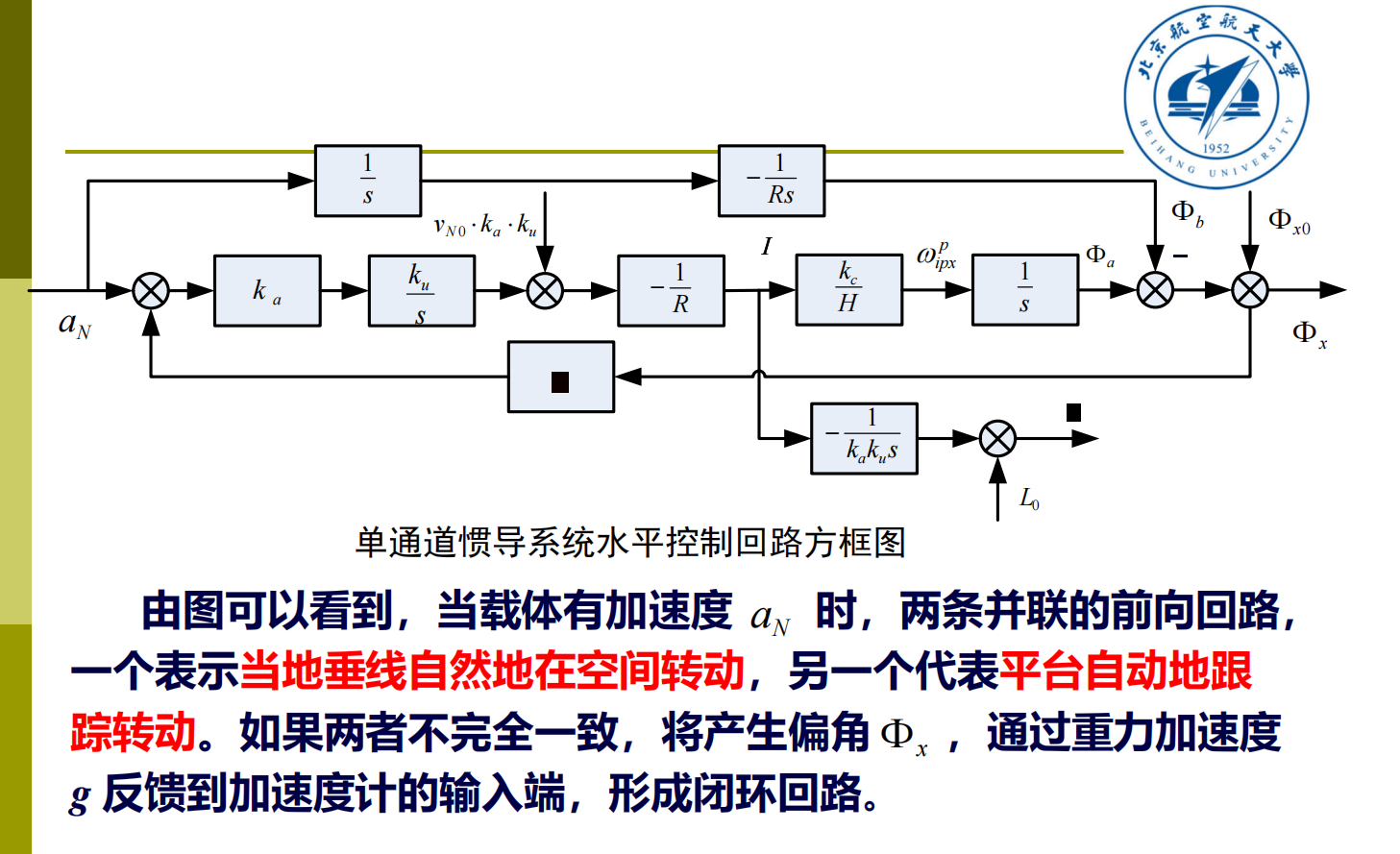
3. 平台的舒勒调谐条件
如果通过设计使两个并联的前向回路的传递函数完全相等,即满足:
则无论加速度 为何值,两条前向回路的作用始终互相抵消,恒有 。只要严格初始对准使 ,则平台将始终跟踪当地水平面,反馈回路将不起作用。
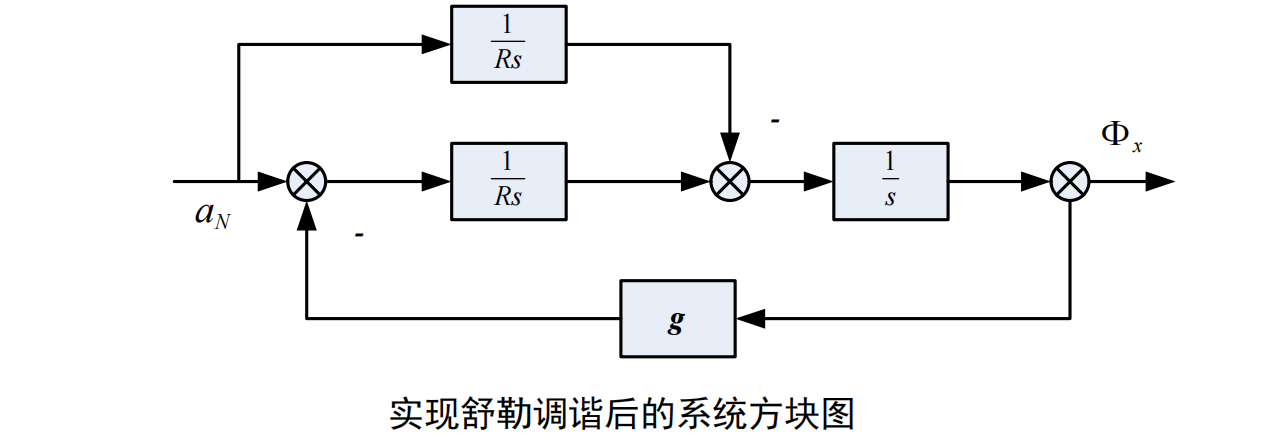
所以(2)式就是平台水平控制回路的舒勒调谐条件,他是通过调整传递系数实现舒勒调谐的。
4. 惯导系统高度通道的问题
如果平台跟踪了水平面,那么高度通道上重力加速度的分量应该就是他本身,不过注意到重力也是高度的函数,所以也要列写相应的方程
分析特征方程后发现系统有正根,误差会随时间发散,因此,不能直接采用纯惯性的高度通道,而必须引入外部高度信息进行组合,使系统获得必要的阻尼后再求高度。
纯惯性的高度通道是不稳定的,必须引入外部(气压高度表、无线电高度表、大气数据系统等)的高度信号来对高度通道构成阻尼回路,这样可以得到动态品质较好而误差又不随时间发散的组合高度系统。