陀螺仪的基本特性
进动性和定轴性
二自由度陀螺仪的进动性
定义:在陀螺仪上施加外力矩,会引起陀螺动量矩矢量相对于惯性空间转动的特性
进动方向
- 陀螺动量矩矢量 沿最短路径握向外力矩 的右手旋进方向, 就是进动角速度的方向。
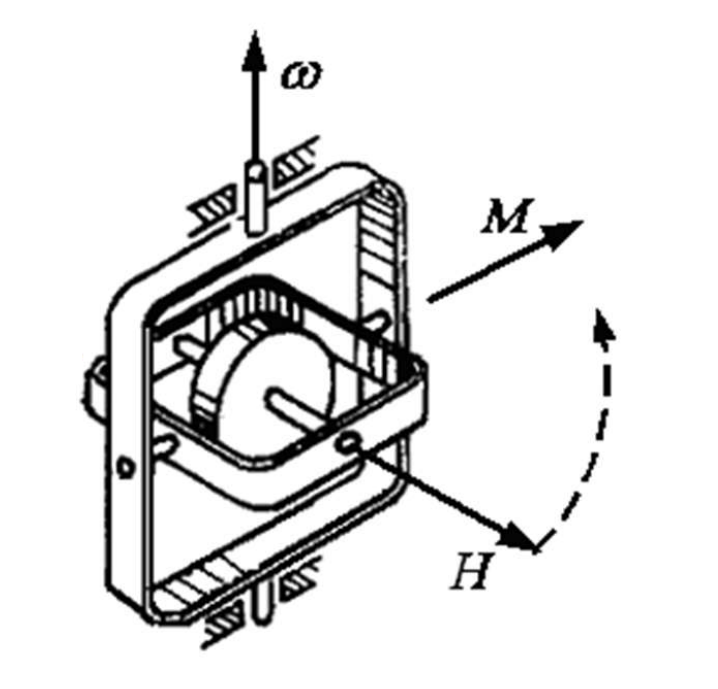
- 角速度大小:
提示
这里的外力矩是作用在内框或外框轴上的,不会改变动量矩的大小,根据动量矩定理,只能改变动量矩的方向
进动产生的原因
内因——转子的高速自转和动量矩的存在
外因——外力矩的作用
注意
这里动量矩的变化都是相对于惯性空间而言的,利用进动性可以测量出基座的转动角速度
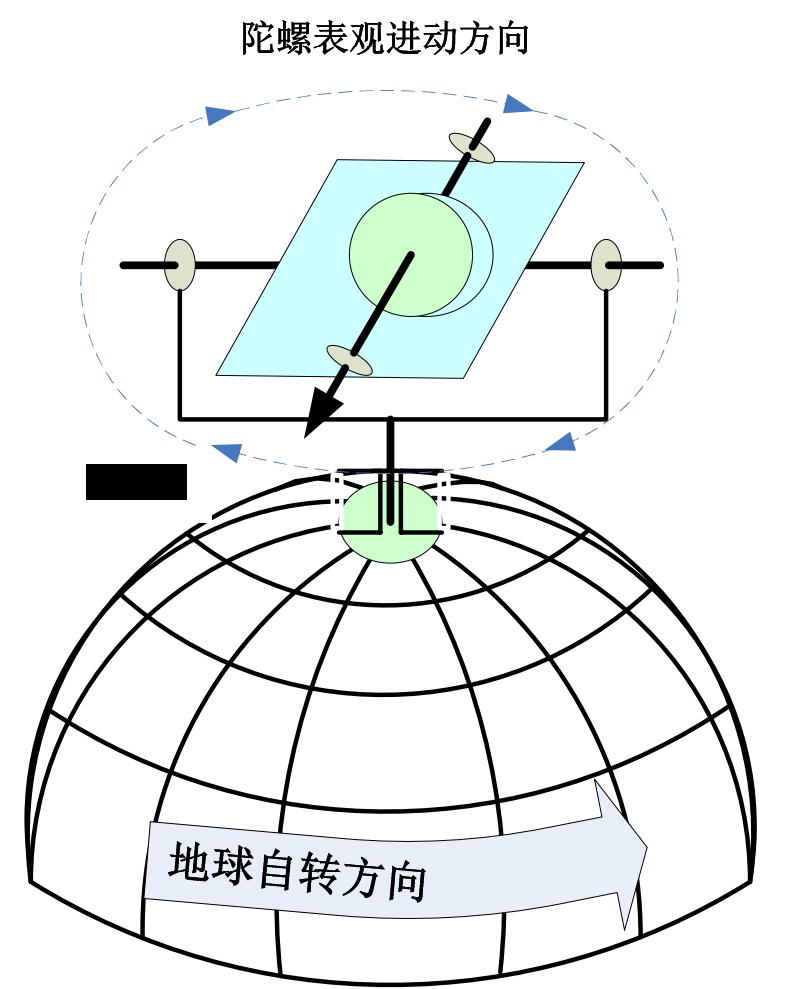
- 表观进动
- 因为地球地面不是惯性系,观察者以地球作为参考基准所看到的这种表面上的进动现象,叫做陀螺仪的表观进动。每24小时进动一周
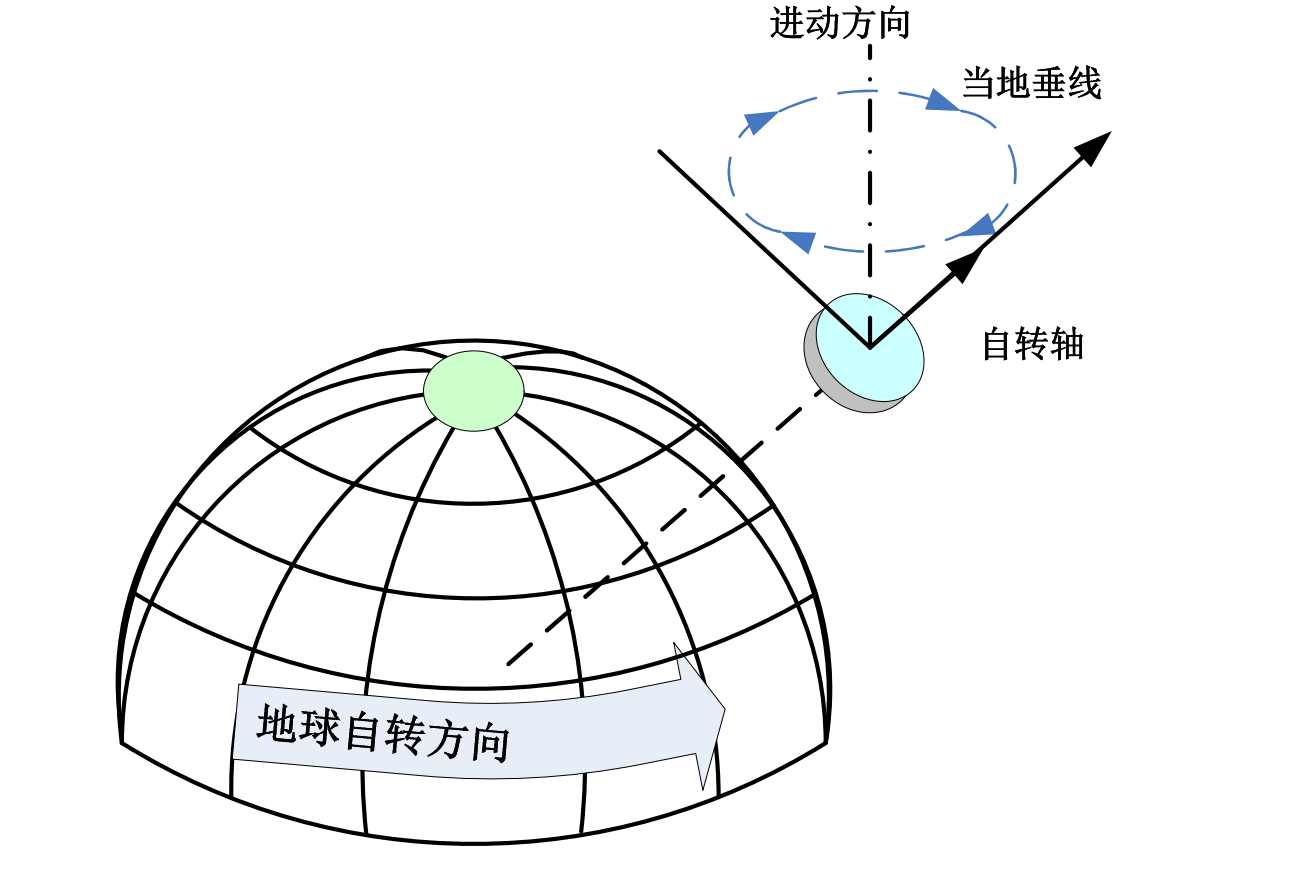
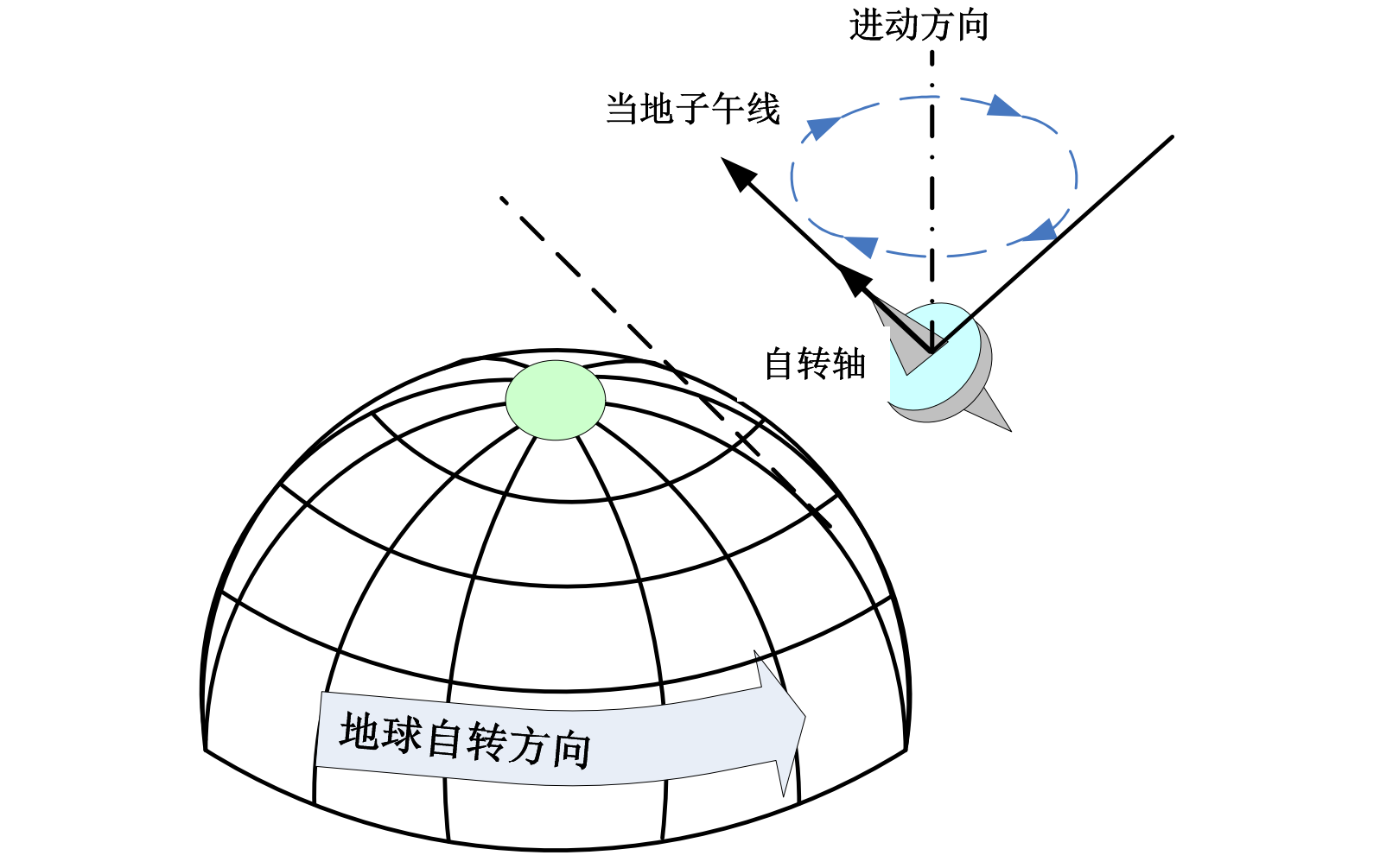
- 不同情况下表观进动的方向:
地球北极放置:
任意纬度(自转轴指向当地垂线)
任意纬度(自转轴指向当地子午线)
这里的分析参考一下转子陀螺仪的定轴性与进动性 - 知乎 (zhihu.com)
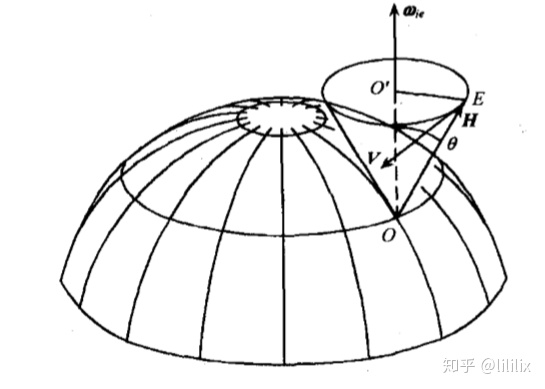
如果在地球赤道坐标系下观察,可知角动量的变化会受到参考坐标系角速度的影响,由哥氏定理:
其中, 是与地球固连的地球坐标系。 当不施加外力矩时,即 时,
其中, 即在地球坐标系下观察到的角动量 变化的速度 ,速度的方向如下图,速度的大小为 。
转子的矢端 绕 轴的旋转角速度大小为 ,方向与 相反。
上述结果说明,当转子陀螺的角动量与地球的自转角速度间的夹角 时,地球上观察到的转子陀螺自转轴以 的角速度做旋转,旋转所形成的曲面为一圆锥面,对称轴平行于地轴,半锥角为 ,陀螺的这种运动称为表观运动。
二自由度陀螺仪的定轴性
定义:高速转动的陀螺仪,如果不受外力矩作用,自转轴将相对惯性空间保持方向不变的特性
这是转动惯量的一种体现
漂移角速率
由干扰力矩引起,同样满足动量矩定理
其中是干扰力矩
干扰力矩的主要来源
- 轴承间的摩擦
- 陀螺仪重心与框架中心不重合
- 陀螺马达的动不平衡
单自由度陀螺仪的特性
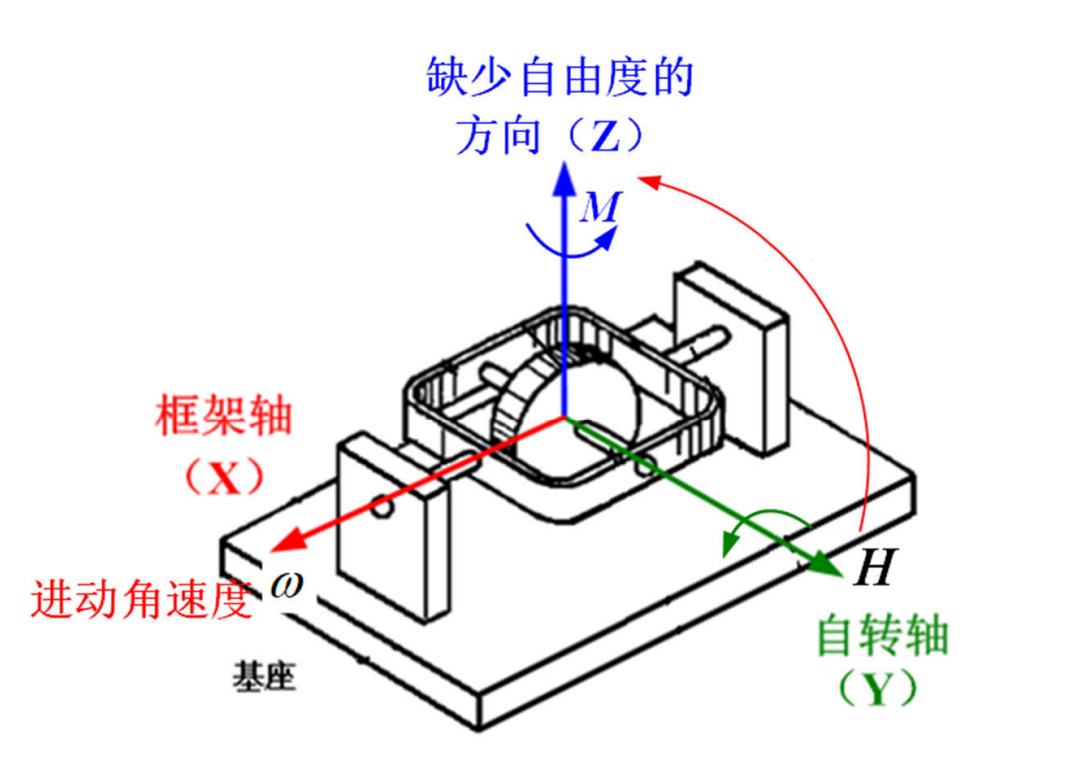
上图是一个单自由度陀螺
可以看到其中的转子少了Z方向的自由度
- 当且仅当基座绕缺少自由度的方向()转动时,将通过框架轴个框架施加一个力矩,使得陀螺仪绕框架轴()进动
提示
这表明,单自由度陀螺仪具有敏感绕其缺少自由度轴线的角运动的特性。