系统误差
误差来源、误差方程、影响误差的因素
误差源
- 元件误差
- 安装误差
- 初始条件误差
- 运动误差
- 其他误差
误差分析方法
- 引入计算机坐标系c
- 认为误差是小扰动,忽略二阶小量
- 建立误差方程
平台系相对于地理系的误差
这里以指北惯导系统为例
上式的意义:通过引入计算机坐标系c,把平台系相对地理系的误差角 分成了两部分:
- 一部分是计算机系相对地理系的误差角 ,它主要反映了导航参数误差 及 。这种误差通过给平台的指令角速率转化为平台误差角的一部分
- 另一部分是平台系相对计算机系的误差 ,它主要反映了陀螺平台自身的漂移角速度 以及施矩轴线偏离了正确位置所造成的平台误差角。
误差方程的建立
- 定义误差量
- 误差传递方向
惯导平台的两个水平控制回路既有交联影响,同时又构成了一个大的闭环系统。因而误差量之间的相互影响也具有相同的特点。下图是惯性平台误差传递方向的示意图。
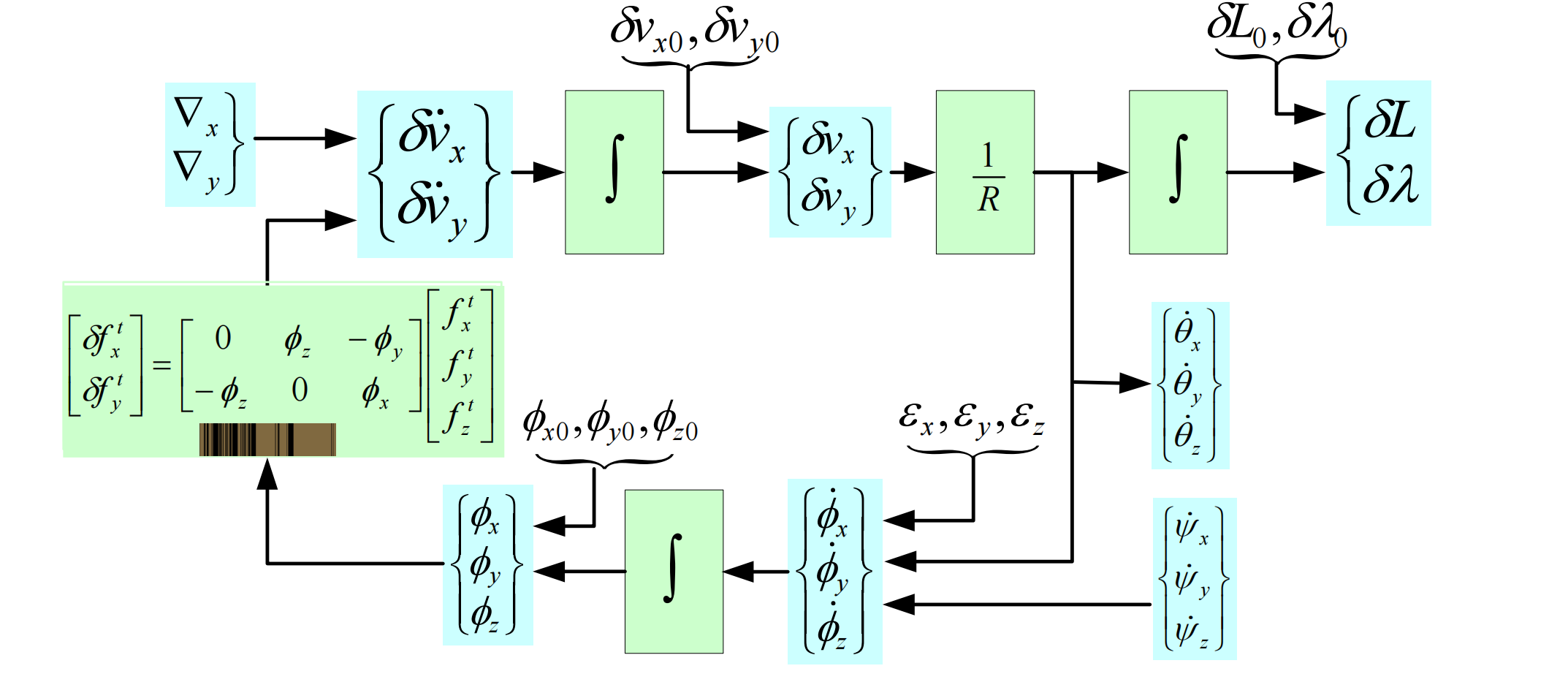
在建立系统误差方程时,也可以分为三段导出各误差量之间的函数关系,即速度误差方程、经纬度误差方程和平台误差方程。
建立系统误差方程的一般步骤
- 找到或建立有关参数的原始方程
- 将原始方程进行微分处理,先把原始方程中对地理系的参数改写成对计算机系的参数,使之成为计算机解算方程,然后进行如下误差量代换,如令等等,展开后再和原始方程相减,略去二阶小量,经过整理,即得到以误差量为基本参数的误差方程。
- 三段误差方程的总和就是系统误差方程。可利用拉氏变换将方程组表示成矩阵形式。
指北惯导系统影响误差的几个因素
速度误差:
- 加速度计零偏
- 平台相对水平面有倾斜,加速度计敏感一部分重力加速度
- 计算机在补偿加速度计输出量中的有害加速度时,把速度误差的因素也带了进去
平台误差:
- 陀螺平台的漂移项
- 由平台误差角引起的交叉耦合误差项
- 由于导航参数的误差引起的误差项